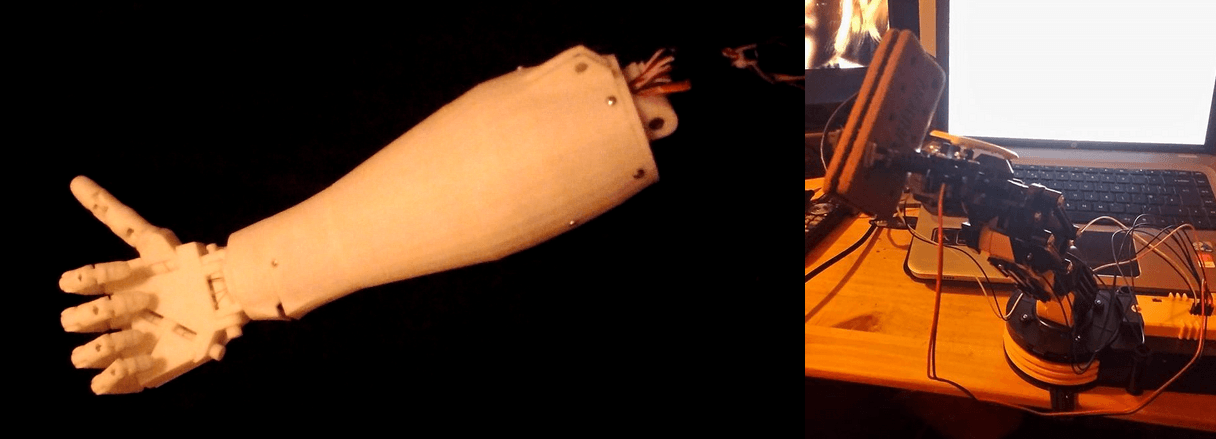
Consideration should be given to the various ways in which a robotic system can interact with its environment – traditionally production and industrial robots have used a variety of means, including claws and clamps. Marc is styled as a humanoid robot, and as such its manipulating limbs are styled after human arms and hands (See above image, left panel). Whilst this looks more human, having 5 digits with multiple degrees of freedom and points of articulation makes the manipulators far harder to develop and work with, as greater precision and complexity of control are required. By contrast, simpler manipulators (such as the simple claw arm robot I have built as a side project, pictured above) are much easier to develop and program for, but lack dexterity.
It seems sensible to conclude that the type of manipulator deemed appropriate to be integrated into a system should be determined by the purpose the system serves – for human-robot interaction research with a humanoid platform, a more human-looking design makes sense, whereas if the research is looking at interacting with the environment, such as for object manipulation, removing the complexity of a multi-digit, complexly articulated manipulator in favour of a simpler claw grabber mechanism may make sense.
Comments are closed.