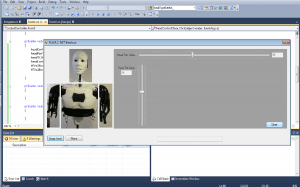
This control, currently being developed, allows a user to control the robot via serial communication between the arduino board and a PC. The controller is written in C# and uses panels for control clusters; a user picks the part of the body to move on the diagram, which enables the controls for that part of the robot.